UAV fleet


Back in college around 2013 the technology for drones really began to advance. I found myself spending what little money I had on some of the earliest quadcopter parts. I had some (by today's standards) terrible quality motors and control boards, but the hobby was addicting. As time progressed and the cost and weight of all the components necessary came down, it became more feasible to build one for myself. So I built multiple. The small 5" racing quads are great, I love flying those. They're snappy and take great videos. However, after flying those for some time, I saw what other people were doing with larger platforms and decided I wanted to try it myself!
I started off with an XUAV Clouds pictured top. With a wingspan over 6 feet, this thing has a massive cargo capacity which really came in handy. For large fields > 5 acres, this is the best way to go. Sustained flight times can exceed one hour and it has a raspberry pi on board that takes images from two sensors. One is RGB, the other is NIR for field health.
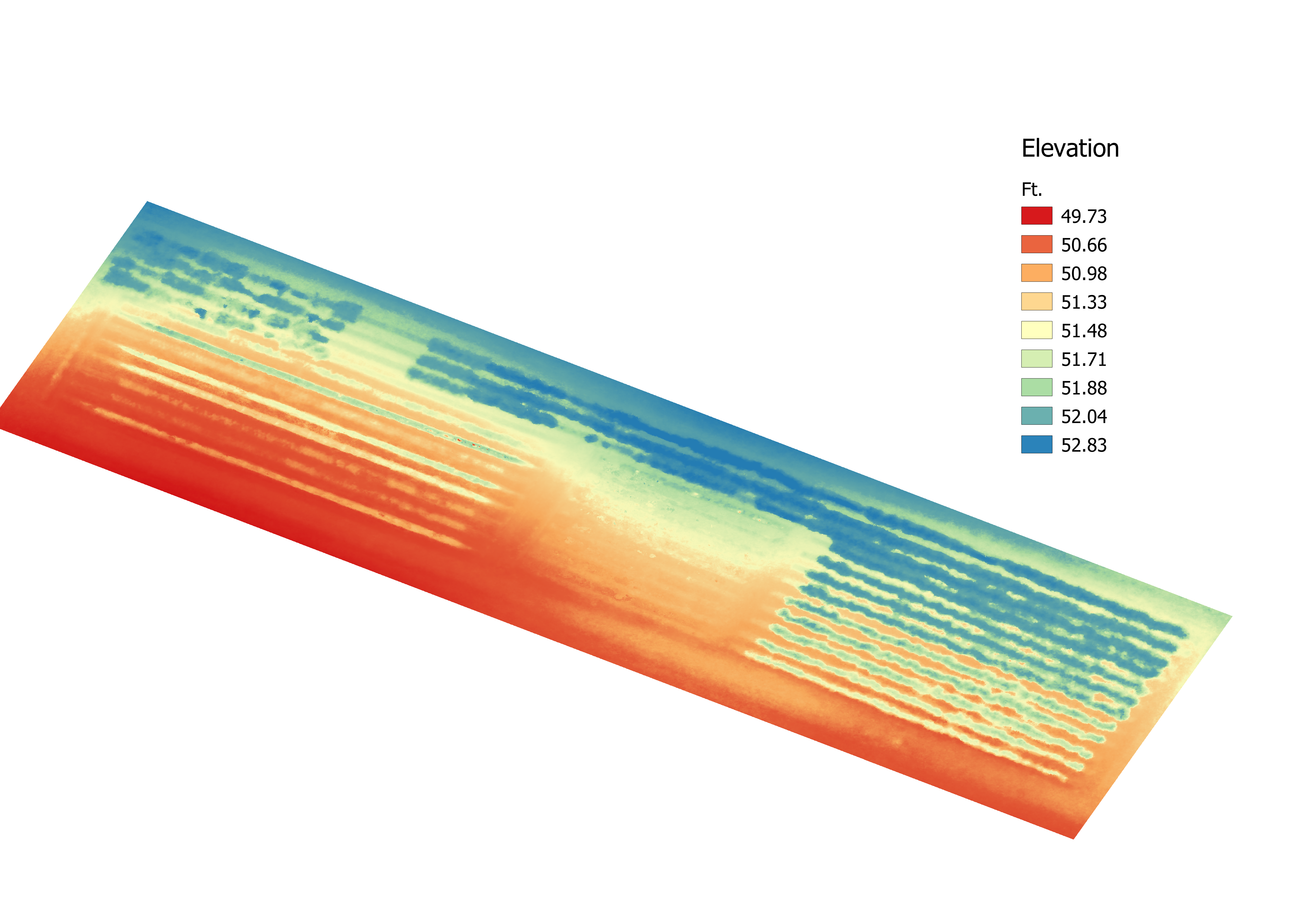
The second large drone is LAPDOG, a hexacopter with a DSLR for high resolution imagery. LAPDOG produced both the stitched orthomosaic and the DEM pictured on the left. Both drones use iNav, but I am in the process of transitioning them to ardupilot because it is significantly more feature-rich.
One of the benefits of having the compute cluster is being able to use Open Drone Map locally. This package is open source and incredibly powerful, but it has steep computing requirements. If you would like to see the full 3D image and point cloud give it a look! Just please beware its a 250mb file and will take some time to load.